자율 주행 자동차가 외부의 신호에 대처하는 기술은 사실상 완성 단계에 있다. 멈추라 할 때 멈추고, 달려라 할 때 달리는 기술은 자율 주행차가 맞닥뜨려야 할 수많은 변수들 중 비교적 통제 가능한 범주에 속한다. 수많은 학습을 통해 왠만한 대응력은 인간 이상으로 갖추고 있다.
여전히 숙제로 남아 있는 변수는 예측하지 못했던 상황에 반응하는 대처능력이다. 딥러닝을 통해서도 예측할 수 없었던 희소 변수들은 드물기는 하겠지만 제로(0)라고 자신할 수 없는 것들이다. 사람이 취할 수 있는 가장 적극적인 대처는 이 같은 희소 변수들을 가장 빠르게 포착할 수 있는 센서를 가장 많이, 가장 효율적으로 배치하는 일이다.
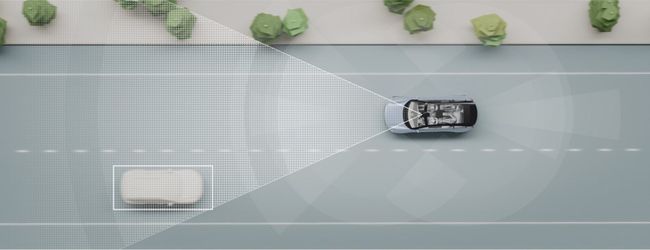
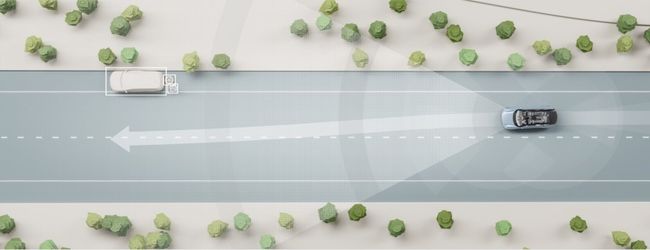
'안전의 볼보'가 볼보바동차의 자율주행 기술 ‘라이드 파일럿(Ride Pilot)’을 미국 캘리포니아에서 선보인다. 무려 29의 센서를 차량 곳곳에 촘촘하게 배치한 시스템이다. 자율주행 소프트웨어 기업 젠스엑트(Zenseact)와 볼보차의 기술 파트너 루미나(Luminar) 개발자가 공동으로 개발했다.
‘라이드 파일럿(Ride Pilot)’은 볼보자동차의 차세대 순수 전기차에 탑재될 자율주행 기술이다.
‘운전자가 의지할 수 있다’는 의미를 함축하고 있는 라이드 파일럿은 최첨단 센서들과 무선 소프트웨어 업데이트(OTA, Over the air) 시스템이 양대 축이다.
볼보자동차의 연구 개발 총괄, 매츠 모버그(Mats Moberg)는 “새로운 업계 기준 설정을 통해 안전성을 훼손하지 않으면서도 자율성을 확보한 진정한 의미의 첫 자율주행 기술을 발표하게 된 것을 자랑스럽게 생각한다”며, “차세대 순수 전기 SUV에 젠스엑트의 새로운 자율주행 소프트웨어와 루미나의 라이다 표준을 탑재하는 것은 자동차 안전 및 자율주행 뿐만 아니라 볼보자동차의 판도를 바꾸는 계기가 될 것”이라고 밝혔다.
‘라이드 파일럿(Ride Pilot)’은 볼보의 차세대 순수 전기 SUV부터 탑재된다. 엄격한 검증과 테스트 프로토콜, 다양한 조건의 고속도로 주행에서 기술 안전성 확인을 거친 후 추가 구독 형태로 제공될 예정이다.
이를 위해 이미 젠스엑트와 함께 스웨덴의 도로에서 자율주행 기능 테스트를 진행하고 있으며, 유럽 및 미국 전역에서도 데이터를 수집하고 있다. 또한 올해 중반까지 기후와 교통 상황, 규제 프레임워크가 자율주행 도입에 있어 유리한 환경을 제공하고 있는 캘리포니아의 도로에서 테스트를 시작할 계획이다.
볼보자동차는 안전성 검증과 자율주행 기술을 위한 모든 승인이 확보되면 캘리포니아를 시작으로 점차 전 세계 다른 시장과 지역에 라이드 파일럿을 확대하는 것을 목표로 하고 있다.
젠스엑트(Zenseact)의 CEO, 오드가르드 앤더슨(Ödgärd Andersson)는 “업계에 새로운 안전 표준을 제시하기 위해서는 전 세계적으로 확장 적용될 수 있는 엄격한 테스트와 검증이 필요하다”며, “젠스엑트의 자율주행 소프트웨어는 이 같은 새로운 표준과 자동차 충돌 사고 제로를 향한 여정에 있어 핵심 역할을 할 것”이라고 소개했다.
라이드 파일럿이 도입될 경우 앞으로 운전자는 주행하는 동안 독서나 글 쓰기, 업무, 사교 활동과 같은 2차 활동을 위한 자유 시간을 확보할 수 있다. 교통 체증과 같은 상황에서 발생할 수 있는 운전의 스트레스에서 벗어나 휴식을 취하거나 재충전을 하며 목적지에 도착할 수 있다.
볼보의 차세대 순수 전기 SUV에는 뛰어난 시야와 인식 신뢰성을 확보할 수 있는 5개의 레이더와 8개의 카메라, 16개의 초음파 센서로 구성된 루미나의 라이다 센서가 탑재된다. 성능 개선과 관리는 지속적인 OTA 소프트웨어 배포로 이뤄진다.
루미나의 창업자 겸 CEO, 오스틴 러셀(Austin Russell)은 “차세대 안전과 자율성의 대중화라는 우리의 비전이 볼보의 새로운 플랫폼에서 개발된 새로운 모델을 통해 현실이 되는 것을 마주하고 있다”며, “볼보의 차세대 SUV가 루미나를 기본으로 채택했다는 것은 앞으로도 도로 위에서 가장 안전한 자동차가 될 수 있는 기회를 얻었다는 것을 의미한다”고 덧붙였다. /100c@osen.co.kr